机械臂末端生态系统
任何机器人,任何抓手,任何末端执行器。
Zimmer Group 与 Schmalz 这两大技术领先者和搬运领域专家强强联手,共同打造出全新的多功能机械臂末端平台 MATCH。MATCH 配有丰富的功能组合和通用通信接口,与市场上所有常见的轻型机器人兼容,一款非常适合协作机器人与常规 6 轴机器人的系统。
优势
- 用于轻型机器人、协作机器人和常规机器人的系统
- 兼容性与灵活性 – 集夹持搬运的主要技术于一体(真空和机械抓取)
- 使用寿命长,即使在自动持续运行下也是如此
- 创新数字生态系统
- 种类繁多的末端执行器
- 使用 Easy-Click 功能手动更换
- 在工装内自动更换
- 领先制造商之一 ABB 推荐使用

机器人接口的标准化
MATCH 系列的标准化潜力巨大:MATCH 机器人模块可以安装在最常见的机器人上,并充当所有 MATCH 兼容末端执行器的连接器。以这种方式标准化的机器人连接法兰极大地提高了应用选择灵活性。安装的末端执行器,无论是机械抓手还是吸盘,都能借助卡扣机制轻松进行手动或自动更换。即插即用的标准化解决方案,确保系统最高可用性。
即插即用 - 简化通信接口
除了机械手臂和末端执行器之间的统一机械连接外,MATCH 还可简化设备通信流程。MATCH 机器人模块有数字 I/O、IO-Link 款式可选,或自带智能通信模块。MATCH 提供必要的通信参数,以通过即插即用技术将不同制造商生产的机器人集成到 MATCH 系统中。

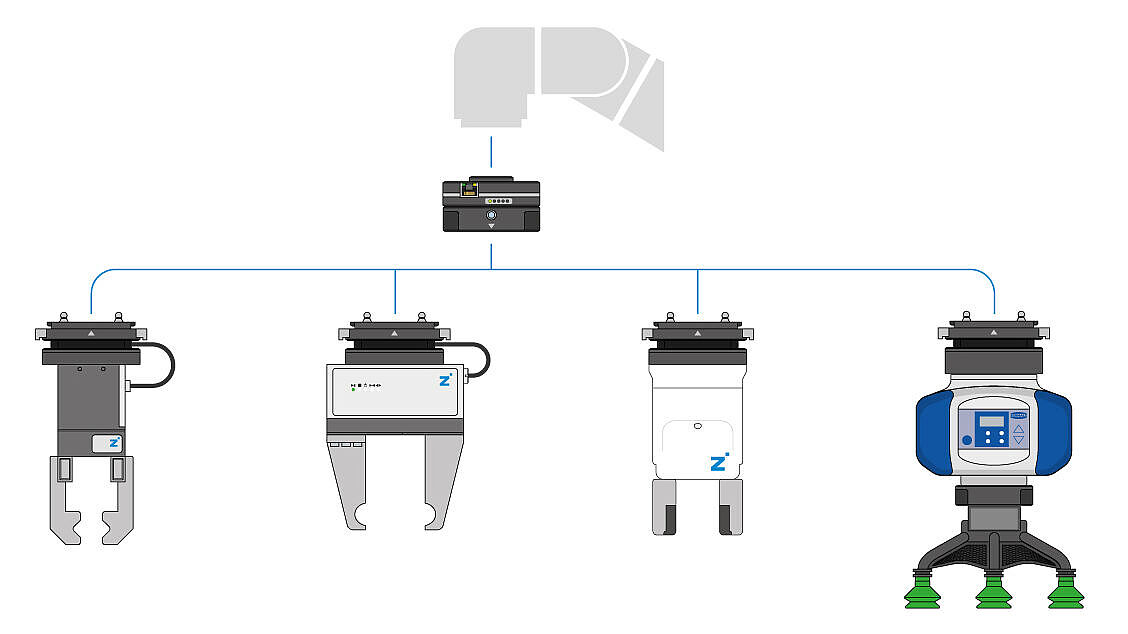
MATCH 生态系统 - 末端执行器选择灵活
MATCH 产品组合包括 Zimmer Group 的多种机械抓手,不仅可用于轻型机器人和 human-robot collaboration,也适用于工业机器人和重型机器人。除了 Zimmer Group 的机械抓手外,采用 Schmalz 真空技术的末端执行器也与 MATCH 生态系统兼容。MATCH 生态系统不仅包括物理组件,也包括各种软件解决方案:针对相应机器人制造商量身定制的应用程序,可直接控制和监测各项功能。
针对复杂机器人应用可实现自动更换
未来的自动化生产将通过灵活使用机器人来提高效率。这意味着,同一台机器人可以通过自动更换末端执行器对一个工件执行多个不同的任务。除此之外,标准化还能简化运营商和集成商的工作。
使用 MATCH 产品系列,不但能自动更换末端执行器,而且还能在不同类型的机器人和系统中使用相同的吸盘或机械抓手。其中,关键组件便是 MATCH 机器人模块,该模块可用于大多数常见制造商生产的机器人。
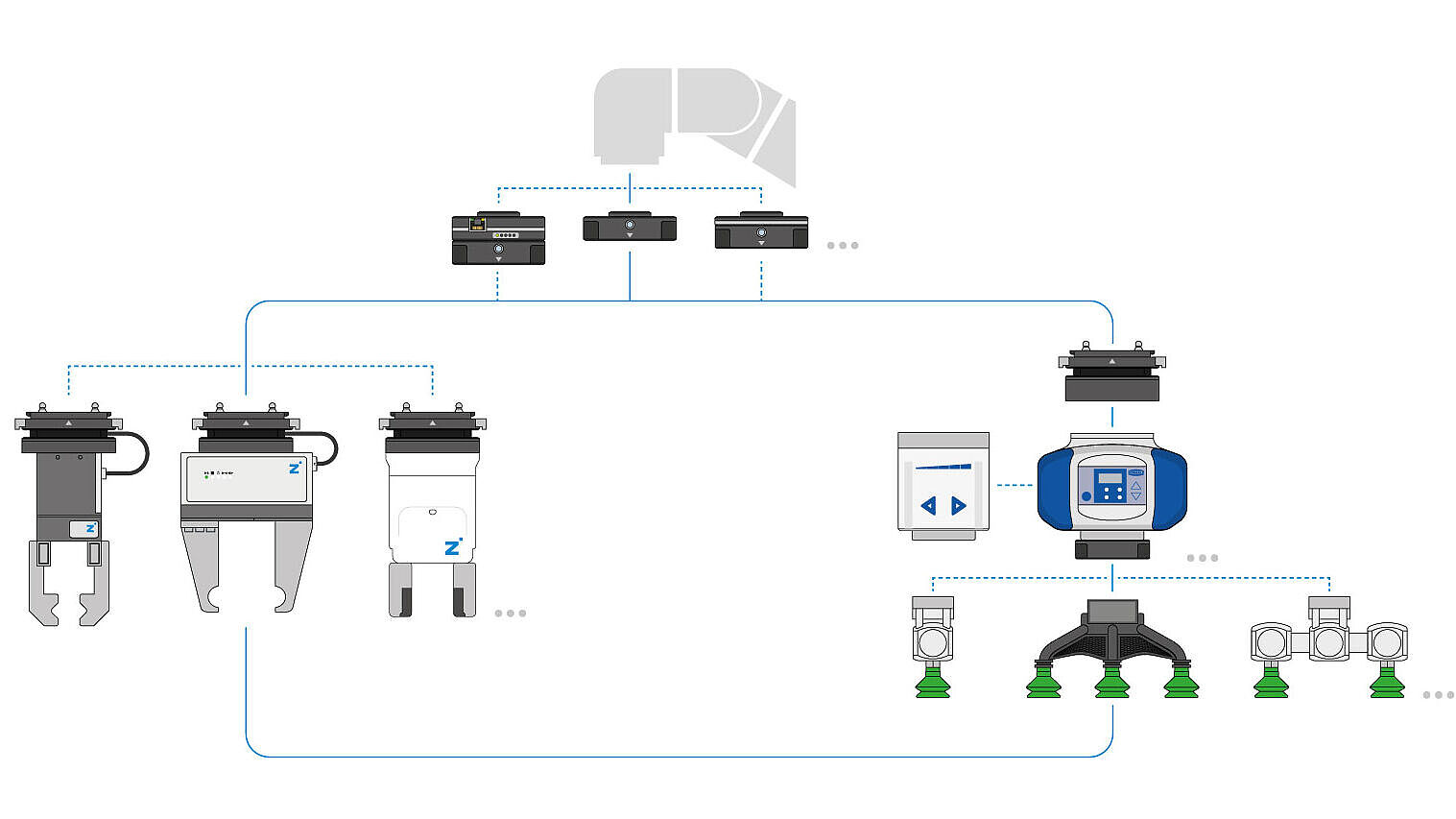
MATCH



组件
0 机器人法兰
1 通信模块
2 机器人模块
3 MATCH 机械抓手
4 软件
MATCH 系列采用机器人专用的标准化接口,可灵活快速地设置机器人应用。除此之外,构造简单,灵活性高,可以使用一个或多个机器人执行多种多样的工作。
传统型




组件
0 机器人法兰
1 通信模块
2 机器人法兰转接装置
3 多功能层
4 快换装置
5 末端执行器转接装置
6 末端执行器

小批量自动机床上料示例
一套全方位的生态系统,包括标准行程至大行程的机械抓手,以及各类抽吸和真空组件,可根据工件进行灵活调整,而且适配快速、维护简便,对于加工件数少的情况,也能轻松实现机床上下料。
协作装配小批量工件示例
协作机器人搭载末端执行器,无需编程知识,也能高效作业。设置方式简便且适配快速,操作便捷。

ABB 协作机器人和工业机器人上的 MATCH
可以轻松灵活整合末端执行器,受到全球机器人制造商的青睐,例如 ABB 就推荐使用 MATCH 生态系统,包括用于其机器人的协作机械抓手。在本影片中,我们将向您展示如何配备机器人模块以适应几乎所有应用。
MATCH for cobots and industrial robots from ABB
![[Translate to Chinesich:]](/fileadmin/_processed_/4/9/csm_ZIM_BIL_PRO_MATCH-BAHNHOF-1__SALL__AQU__V1_bcc011b3af.jpg "[Translate to Chinesich:]")

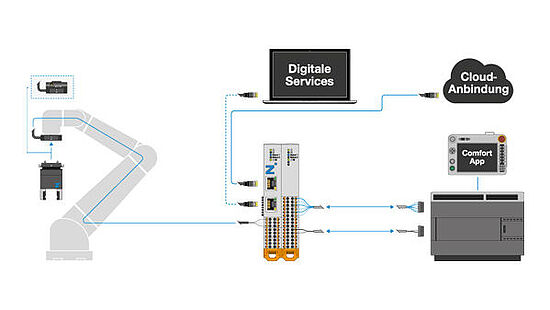



全面的过程控制,轻松应对每个应用
MATCH 为您提供全面的支持与过程控制,从调试到运行再到过程监控。数字服务,例如用于设置和操作、采集过程数据/状态监测、评估和可视化、连接云端的 HMI 功能,为产品生命周期的所有阶段提供附加值。


