Ecosistema end of arm MATCH
¡Descubra MATCH! La interfaz estandarizada combina las dos principales tecnologías de manipulación: sistemas de agarre y de vacío. El innovador ecosistema, compuesto por un módulo de robot, una pinza, una estación de reposo y el software adecuado, puede integrarse de forma rápida y sencilla, lo que permite una producción rentable en el momento oportuno, incluso con pequeñas cantidades. De este modo, usted conserva la máxima flexibilidad, tanto en la elección del efector final como del robot. MATCH es compatible con todos los robots habituales del mercado. Gracias a la interfaz estandarizada y a la opción de una función de cambio manual o automatizado, estará preparado para los requisitos y retos del mercado en constante cambio.




Lo más destacado de la tecnología










FAQ - Preguntas y respuestas sobre MATCH
MATCH es una interfaz estandarizada que combina las principales tecnologías de manipulación: – sistemas de agarre y de vacío. Los rápidos tiempos de personalización le permiten estar perfectamente preparado para las crecientes exigencias del mercado. Su sencilla integración permite una producción rápida y rentable, incluso para pequeñas cantidades. Se beneficiará de la máxima flexibilidad a la hora de seleccionar tanto el efector final como el robot. MATCH es compatible con todos los robots habituales. Gracias a la interfaz estandarizada y a la posibilidad de un cambio manual o automatizado, estará perfectamente equipado para los retos dinámicos de la automatización.
Incluso sin la opción de cambio, MATCH ofrece numerosas ventajas y le prepara para futuros retos. MATCH está listo para su uso inmediato y para conectarse. Un software intuitivo le ayuda durante la puesta en marcha y el control, sin necesidad de conocimientos de programación. La interfaz estandarizada también le ofrece una amplia selección de efectores finales. Un mantenimiento y asistencia sencillos facilitan el acceso a la automatización y permiten lograr rápidamente una producción rentable, incluso para pequeñas cantidades
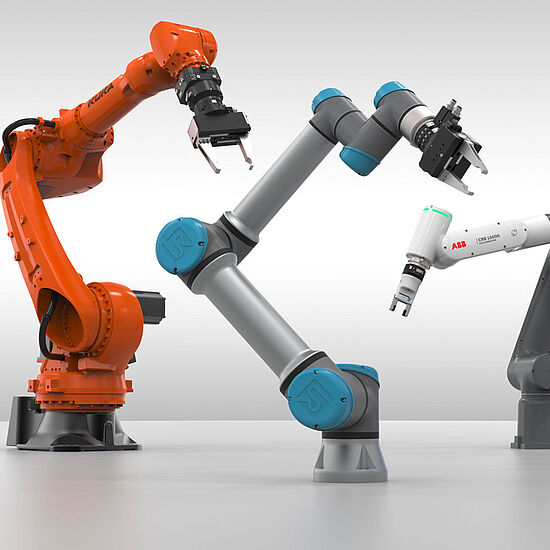
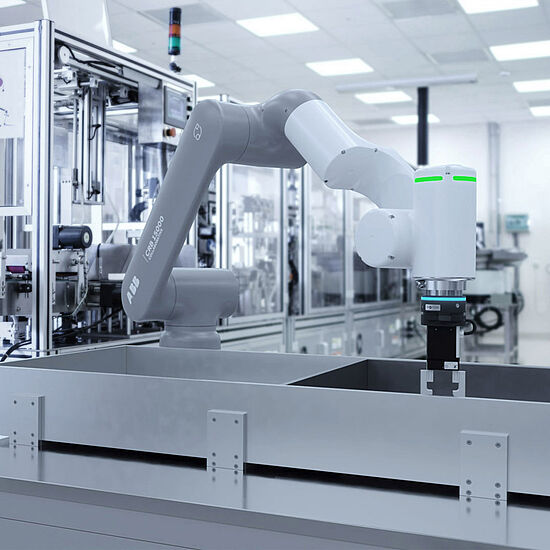
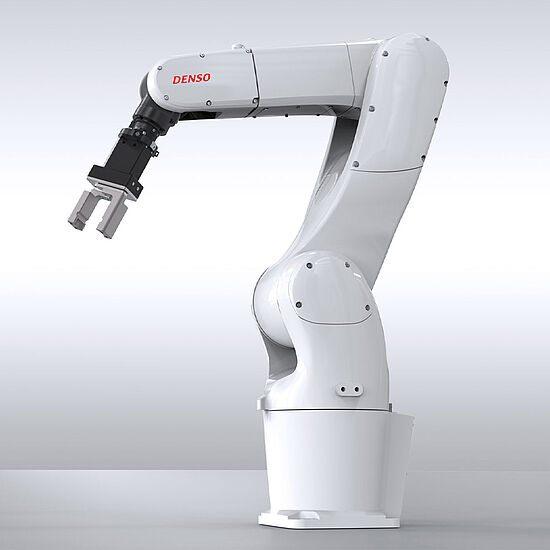
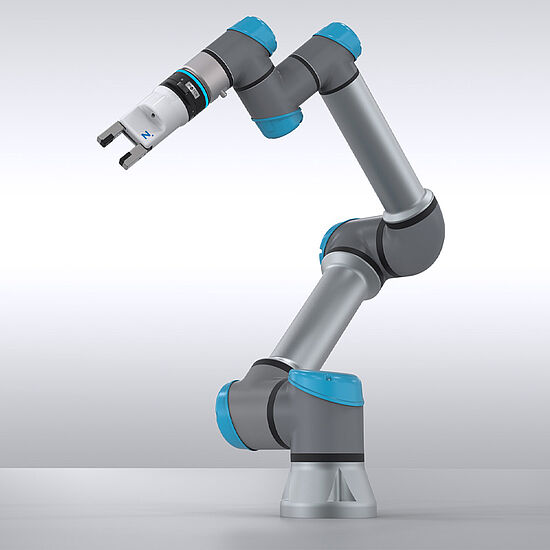
El ecosistema end of arm MATCH es compatible con las principales marcas de robots, como ABB, Denso, Doosan, KUKA, Universal Robots, Fanuc, Yaskawa, Stäubli y Mitsubishi. Si no está seguro de si su robot es compatible, , póngase en contacto con nosotros.
Ofrecemos soluciones para casi todos los usuarios y tipos de robot. Si el modelo de su robot no aparece en la lista, póngase en contacto con nosotros.
La pinza y el robot se comunican a través del Smart Communication Module (SCM). Este módulo sirve de interfaz para el efector final y traslada el sistema de comunicación IO-Link a E/S digitales y viceversa. Se comunica directamente con el control del robot y permite controlar el efector final de forma rápida y sencilla.
Sí, el SCM está disponible tanto sin software para autocableado como en un paquete completo con cable y software personalizado para cada fabricante del robot. Con este paquete estará inmediatamente listo para su uso, sin necesidad de trabajos de cableado adicionales.
La ComfortApp incluida en el paquete, que se adapta al fabricante de su robot, permite un control cómodo y directo del efector final a través de la unidad de mando del robot correspondiente. Se incluyen todos los comandos necesarios para un funcionamiento automático sin problemas.
La opción de E/S digital es adecuada como equipamiento básico para aplicaciones sencillas, como abrir y cerrar la pinza. La variante inteligente IO-Link se recomienda para aplicaciones más complejas que requieren ajustes adicionales de fuerza o recorrido, así como la monitorización del estado. RS485 es la contrapartida específica del fabricante a IO-Link.
Gracias a la interfaz estandarizada del módulo de robot, pueden utilizarse diversos efectores finales. Dependiendo de la aplicación, se suministran pinzas IO-Link con módulo IO-Link o pinzas digitales con módulo de E/S digital
Dependiendo de su aplicación, puede elegir entre componentes de vacío de J. Schmalz o pinzas de Zimmer Group. Gracias a las opciones de cambio manual o automatizado, tiene a su disposición ambas tecnologías de manipulación.
Si no está seguro de qué componente de manipulación es el adecuado para su aplicación, , póngase en contacto con nosotros.
El ecosistema end of arm MATCH es compatible con las principales marcas de robots, como ABB, Denso, Doosan, KUKA, Universal Robots, Fanuc, Yaskawa, Stäubli y Mitsubishi. Si no está seguro de si su robot es compatible, , póngase en contacto con nosotros.
El efector final puede cambiarse manual o automáticamente mediante una estación de reposo y un movimiento controlado por robot.
Gracias a la interfaz estandarizada, el módulo de robot MATCH es compatible con los modelos de robot más comunes. En caso de dudas, consúltenos.